任务单元201:
一、教学目标:(8学时)
|
学习情境 |
起重机认知 |
|
职业行动能力 |
目标 |
|
专业能力 |
应知 |
起重机的结构 |
|
起重机的特点 |
|
起重机的发展现状 |
|
起重机的发展趋势 |
|
应会 |
能简单识别各种类型的起重机 |
|
社会能力 |
通过分组活动,培养团队协作能力 |
|
通过规范文明实训,培养良好的职业道德和安全环保意识 |
|
通过小组讨论、上台演讲评述,培养沟通能力 |
|
方法能力 |
通过查阅资料、文献、培养个人自学能力和获取信息能力 |
|
填写任务工作单,制订工作计划,培养工作方法能力 |
|
具有分析问题,解决实际问题的能力 |
二、学习要求和考核内容
据六步法进行学习:
①资讯(通过集中听课、自学、小组讨论等学习方式获取相应知识点)
②教学给出工作任务单,学生分组行动。
③根据任务完成情况评估,并抽查,演讲。
④完成并上交工作任务单
考核内容:包括学生学习态度、团队协作、知识点掌握.动手操作能力、分析决策能力.问题掌控能力等。
|
序号 |
考核内容 |
考核标准 |
|
1 |
任务任知程度 |
根据任务准确获取学习资料,有学习记录 |
|
2 |
情感态度 |
学习精力集中.学习方法多样,积极主动,
全部出勤 |
|
3 |
团队协作
|
听从指挥,服从安排,积极与小组成员合作,共同完成工作任务 |
|
4 |
工作计划制定
|
有工作计划,计划内容完整.时间安排合理,工作步骤正确 |
|
5 |
任务工作单 |
工作单完成及时.记录完整,结果分析正确.对老师布置的任务能及时上交,正确度在9 0%以上 |
|
6 |
问题思考 |
开动脑筋,积极思考,并对工作任务完成过程中的问题进行分析和解决 |
|
7 |
操作能力 |
操作应安全规范文明,能在规定时间内完成 |
三、学习内容
(一)起重机的分类与用途
装卸起重机械设备有多种分类方法,装卸起重机械按其结构及运动方式可分为四大类:
1.小型起重设备
轻小型起重设备一般只有一个升降机构,使货物作升降运动。在某些场合也可作水平运输(如卷扬机)。属于这一类型的起重设备有:千斤顶、滑车、葫芦、卷扬机。
2.桥式类起重机
桥式类起重机配有起升机构、大车运行机构和小车运行机构。依靠这些机构配合动作,可在整个长方形场地及其上空作业,适用于车间、仓库、露天堆场等场所。桥式起重机包括:通用桥式起重机、堆垛起重机、龙门式起重机、装卸桥、冶金专用起重机等。
3.臂架类起重机
臂架类起重机配有起升机构、旋转机构、变幅机构和运行机构,液压起重机还配有伸缩臂机构。依靠这些机构的配合动作,可在圆柱形场地及上空作业。臂架起重机可装在车辆或其运输(移动)工具上,构成运行臂架式起重机,这种起重机具有良好的机动性,可适用于码头、货场、工场等场所。
臂架类起重机包括:塔式起重机、门座式起重机、汽车起重机、轮胎式起重机、必履带式起重机、浮式起重机、铁路起重机等。流装卸起重机其他的分类方法有:按移动方式分类,按取物装置分类,按机构驱动方式分类等。
(二)起重机的参数
起重机的基本参数是表明起重机工作特性的主要指标,也是正确选择和使用起重机的技术数据。
1.额定起重量
起重机在正常作业时,允许提升货物的最大质量与可从起重机上取下的取物装置质量之和称为起重机的额定起重量,一般用字母Q表示,单位为t。
2.起升高度
起升高度是指起重机运行轨道面或地面到取物装置上极限位置的高度(吊钩测量到吊钩中心,抓斗测量到最低点),当取物装置可以降到地面或轨道顶面以下时,从地面或轨道顶面下放至下极限位置的距离称为下放深度。起升高度与下放深度之和称为总起升高度,以字母H表示,单位为m。
3.跨度或幅度
跨度是指桥式类起重机大车运行两轨道中心线之间的距离,以字母L表示,单位为m。幅度是指臂架起重机的旋转中心线至取物装置中心线之间的水平距离,以字母R表示,单位为m。有最大幅度Rmax和最小幅度Rmin。
跨度和幅度是表示起重机工作范围大小的参数。
4.额定工作速度
起重机的工作速度包括起升、变幅、旋转、运行等机构的速度。
起升速度指吊钩(或其他取物装置)的上升速度,以字母v来表示,单位为m/min。变幅速度是指变幅机构从最大幅度变到最小幅度的平均线速度,单位为m/min。旋转速度是指回转式起重机每分钟的转数,以字母n表示,单位为r/min。运行速度一般是指起重机的大车行走速度,以U表示,单位为m/min;无轨道起重机行走速度单位为km/h。
各类起重机根据安全、工艺、生产率等方面的综合要求,规定了上述工作速度的额定值,称为该机构的额定工作速度。例如,通用桥式吊钩起重机的各机构工作速度范围是:起升速度为1~20m/min;大车运行速度为30~120m/min;小车运行速度为10~50m/min。超速运行会影响安全生产,而速度太低又会降低生产率,因此,速度的选择必须恰当。
5.起重机工作类型
起重机类型是指起重机工作忙闲程度和载荷变化程度的参数。工作忙闲程度,对整体起重机来说,就是指在一年总时间约8700小时内,起重机的实际运转时数与总时数的比;对机构来说,则是指某一个机构在一年时间内运转时数与总时数的比。
(二)起重机的发展趋势
物料搬运成了人类生产活动的重要组成部分,距今已有五千多年的发展历史。随着生产规模的扩大,自动化程度的提高,作为物料搬运重要设备的起重机在现代化生产过程中应用越来越广,作用愈来愈大,对起重机的要求也越来越高。起重机正经历着一场巨大的变革。大型化和专用化
由于工业生产规模的不断扩大,生产效率日益提高,以及产品生产过程中物料装卸搬运费用所占比例逐渐增加,促使大型或高速起重机的需求量不断增长。起重量越来越大,工作速度越来越高,并对能耗和可靠性提出更高的要求。起重机已成为自动化生产流程中的重要环节。起重机不但要容易操作,容易维护,而且安全性要好,可靠性要高,要求具有优异的耐久性、无故障性、维修性和使用经济性。目前世界上最大的浮游起重机起重量达6,500t,最大的履带起重机起重量达3,000t,最大的桥式起重机起重量为1,200t,集装箱岸边装卸桥小车的最大运行速度已达350m/min,堆垛起重机最大运行速度是240m/min,垃圾处理用起重机的起升速度达100m/min
业生产方式和用户需求的多样性,使专用起重机的市场不断扩大,品种也不断更新,以特有的功能满足特殊的需要,发挥出最佳的效用。例如冶金、核电、造纸、垃圾处理的专用起重机,防爆、防腐、绝缘起重机和铁路、船舶、集装箱专用起重机的功能不断增加,性能不断提高,适应性比以往更强。德国德马格公司研制出一种飞机维修保养的专用起重机,在国际市场打开了销路。这种起重机安装在房屋结构上,跨度大、起升高度大、可过跨、停车精度高。在起重小车下面安装有多节伸缩导管,与飞机维修平台相连,并可作360度旋转。通过大车和小车的位移、导管的升降与旋转可使维修平台到达飞机的任一部位,进行飞机的维护和修理,极为快捷方便。
模块化和组合化
用模块化设计代替传统的整机设计方法,将起重机上功能基本相同的构件、部件和零件制成有多种用途,有相同联接要素和可互换的标准模块,通过不同模块的相互组合,形成不同类型和规格的起重机。对起重机进行改进,只需针对某几个模块。设计新型起重机,只需选用不同模块重新进行组合。可使单件小批量生产的起重机改换成具有相当批量的模块生产,实现高效率的专业化生产,企业的生产组织也可由产品管理变为模块管理。达到改善整机性能,降低制造成本,提高通用化程度,用较少规格数的零部件组成多品种、多规格的系列产品,充分满足用户需求。
目前,德国、英国、法国、美国和日本的著名起重机公司都已采用起重机模块化设计,并取得了显著的效益。德国德马格公司的标准起重机系列改用模块化设计后,比单件设计的设计费用下降12%,生产成本下降45%,经济效益十分可观。德国德马格公司还开发了一种KBK柔性组合式悬挂起重机,起重机的钢结构由冷轧型轨组合而成,起重机运行线路可沿生产工艺流程任意布置,可有叉道、转弯、过跨、变轨距。所有部件都可实现大批量生产,再根据用户的不同需求和具体物料搬运路线在短时间内将各种部件组合搭配即成。这种起重机组合性非常好,操作方便,能充分利用空间,运行成本低。有手动、自动多种形式,还能组成悬挂系统、单梁悬挂起重机、双梁悬挂起重机、悬臂起重机、轻型门式起重机及手动堆垛起重机,甚至能组成大型自动化物料搬运系统。
轻型化和多样化、
相当批量的起重机是在通用的场合使用,工作并不很繁重。这类起重机批量大、用途广,考虑综合效益,要求起重机尽量降低外形高度,简化结构,减小自重和轮压,也可使整个建筑物高度下降,建筑结构轻型化,降低造价。因此电动葫芦桥式起重机和梁式起重机会有更快的发展,并将大部分取代中小吨位的一般用途桥式起重机。德国德马格公司经过几十年的开发和创新,已形成了一个轻型组合式的标准起重机系列。起重量为1-63吨,工作级别为A1-A7,整个系列由工字形和箱型单梁、悬挂箱形单梁、角形小车箱形单梁和箱形双梁等多个品种组成。主梁与端梁相接以及起重小车的布置有多种型式,可适合不同建筑物及不同起吊高度的要求。根据用户需要每种规格起重机都有三种单速及三种双速供任意选择,还可以选用变频调速。操纵方式有地面手电门自行移动、手电门随小车移动、手电门固定、无线遥控、司机室固定、司机室随小车移动、司机室自行移动等七种选择。大车及小车的供电有电缆小车导电、DVS系统两种方式。如此多的选择项,通过不同的组合,可搭配成百上千种起重机,充分满足用户不同的需求。这种起重机的另一最大优点是轻型化,自重轻、轮压轻、外形尺寸高度小,可大大降低厂房建筑物的建造成本,同时也可减小起重机的运行功率和运行成本。与通用产品相比较,起重量为10t,跨度22.5m,通用双梁桥式起重机自重是24t,起重机轨面以上高度1876mm,起重机宽度5980mm; 德马格起重机的自重只有8.7t,重量轻了176%,起重机轨面以上高度为920mm,降低了104%, 2980mm,外形尺寸减少了100%。
自动化和智能化
起重机的更新和发展,在很大程度上取决于电气传动与控制的改进。将机械技术和电子技术相结合,将先进的计算机技术、微电子技术、电力电子技术、光缆技术、液压技术、模糊控制技术应用到机械的驱动和控制系统,实现起重机的自动化和智能化。大型高效起重机的新一代电气控制装置已发展为全电子数字化控制系统。主要由全数字化控制驱动装置、可编程序控制器、故障诊断及数据管理系统、数字化操纵给定检测等设备组成。变压变频调速、射频数据通讯、故障自诊监控、吊具防摇的模糊控制、激光查找起吊物重心、近场感应防碰撞技术、现场总线、载波通讯及控制、无接触供电及三维条形码技术等将广泛得到应用。使起重机具有更高的柔性,以适合多批次少批量的柔性生产模式,提高单机综合自动化水平。重点开发以微处理机为核心的高性能电气传动装置,使起重机具有优良的调速和静动特性,可进行操作的自动控制、自动显示与记录,起重机运行的自动保护与自动检测,特殊场合的远距离遥控等,以适应自动化生产的需要。例如采用激光装置查找起吊物的重心位置,在取物装置上装有超声波传感器引导取物装置自动抓取货物。吊具自动防摇系统能在运行速度200m/min、加速度0.5m2/s的情况下很快使起吊物摇摆振幅减至几个毫米。起重机可通过磁场变换器或激光达到高精度定位。起重机上安, 装近场感, 应系统,可避免起重机之间的互相碰撞。起重机上还安装了微机自诊断监控系统,该系统能提供大部分常规维护检查内容,如齿轮箱油温、油位,车轮轴承温度,起重机的载荷、应力和振动情况,制动器摩擦衬片的寿命及温度状况等。
成套化和系统化
在起重机单机自动化的基础上,通过计算机把各种起重运输机械组成一个物料搬运集成系统,通过中央控制室的控制,与生产设备有机结合,与生产系统协调配合。这类起重机自动化程度高,具有信息处理功能,可将传感器检测出来的各种信息实施存储、运算、逻辑判断、变换等处理加工,进而向执行机构发出控制指令。这类起重机还具有较好的信息输入、输出接口,实现信息全部、准确、可靠地在整个物料搬运集成系统中的传输。起重机通过系统集成,能形成不同机种的最佳匹配和组合,取长补短,发挥最佳效用。目前重点发展的有工厂生产搬运自动化系统,柔性加工制造系统,商业货物配送集散系统,集装箱装卸搬运系统,交通运输和邮电部门行包货物的自动分拣与搬运系统等。
生产工程机械的美国卡特皮勒公司金属结构厂购置了一条以桥式起重机为主的物料自动搬运系统,用于钢板的喷丸处理、切割和入库的自动装卸搬运作业,比原先采用单机操作工作效率提高了65%。日本东芝浜川崎工厂用全自动桥式起重机组成的物料输送系统来搬运柔性加工线上的夹具和工件,为机床运送毛坯或将加工好的零件送到下一工序或仓库。这些在空间移动的起重机搬运系统代替了过去通常使用的自动导向搬运车,使车间的地面面积得到充分利用。
新型化和实用化
结构方面采用薄壁型材和异形钢、减少结构的拼接焊缝,提高抗疲劳性能。采用各种高强度低合金钢新材料,提高承载能力,改善受力条件,减轻自重和增加外形美观。桥式起重机的桥架结构型式大多采用箱形四梁结构,主梁与端梁采用高强度螺栓联接,便于运输与安装。
在机构方面进一步开发新型传动零部件,简化机构。“三合一”运行机构是当今世界轻、中级起重机运行机构的主流,将电动机、减速器和制动器合为一体,具有结构紧凑、轻巧美观、拆装方便、调整简单、运行平稳、配套范围大等优点,国外已广泛应用到各种起重机运行机构上。为使中小吨位的起重小车结构尽量简化,同时降低起重机的尺寸高度,减小轮压,国外已大量采用电动葫芦作为起升机构。为了减轻自重,提高承载能力,改善加工制造条件,增加产品成品率,零部件尽量采用以焊代铸,如减速器壳体、卷简、滑轮等都用焊接结构。减速器齿轮都采用硬齿面,以减轻自重、减小体积、提高承载能力、增加使用寿命。液压推杆盘式制动器的应用范围也越来越大。此外,各机构采用的电动机都向高转速发展,从而减小电机基座号,减轻重量与减小外形尺寸,并可配用制动力矩小的制动器。
在电控方面开发性能好、成本低、可靠性高的调速系统和电控系统,发展半自动和全自动操纵。采用机电仪液一体化技术,提高使用性能和可靠性,增加起重机的功能。今后会更加注重起重机的安全性,研制新型安全保护装置。重视司机的工作条件,应用人体工程学设计司机室,降低司机的劳动强度。德国近年为解决起重机吊钩的防摆控制,开发了模糊逻辑电路的控制技术,用神经信息和模糊技术来寻找开始加速的最佳时刻,将有经验司机防摆实际操作的数据输入系统,实现最优控制。模糊控制方式能确定实施自动工作的控制指令,将人们主观上的模糊量通过模糊集合进行数字化定量,再利用计算机实现像熟练司机一样的自如操作,取得了更高的效率和安全性。模糊控制作为新的控制方法已引人注目。
四、学习思考:
起重机的结构与分类及使用场合
任务单元202:
一、教学目标:(8学时)
|
学习情境 |
电动葫芦起重机 |
|
职业行动能力 |
目标 |
|
专业能力 |
应知 |
电动葫芦起重机的结构 |
|
电动葫芦起重机的特点 |
|
电动葫芦起重机的发展现状 |
|
电动葫芦起重机的发展趋势 |
|
应会 |
会根据实际工矿选择电动葫芦起重机 |
|
社会能力 |
通过分组活动,培养团队协作能力 |
|
通过规范文明实训,培养良好的职业道德和安全环保意识 |
|
通过小组讨论、上台演讲评述,培养沟通能力 |
|
方法能力 |
通过查阅资料、文献、培养个人自学能力和获取信息能力 |
|
填写任务工作单,制订工作计划,培养工作方法能力 |
|
具有分析问题,解决实际问题的能力 |
二、学习要求和考核内容
据六步法进行学习:
①资讯(通过集中听课、自学、小组讨论等学习方式获取相应知识点)
②教学给出工作任务单,学生分组行动。
③根据任务完成情况评估,并抽查,演讲。
④完成并上交工作任务单
考核内容:包括学生学习态度、团队协作、知识点掌握.动手操作能力、分析决策能力.问题掌控能力等。
|
序号 |
考核内容 |
考核标准 |
|
1 |
任务任知程度 |
根据任务准确获取学习资料,有学习记录 |
|
2 |
情感态度 |
学习精力集中.学习方法多样,积极主动,
全部出勤 |
|
3 |
团队协作
|
听从指挥,服从安排,积极与小组成员合作,共同完成工作任务 |
|
4 |
工作计划制定
|
有工作计划,计划内容完整.时间安排合理,工作步骤正确 |
|
5 |
任务工作单 |
工作单完成及时.记录完整,结果分析正确.对老师布置的任务能及时上交,正确度在9 0%以上 |
|
6 |
问题思考 |
开动脑筋,积极思考,并对工作任务完成过程中的问题进行分析和解决 |
|
7 |
操作能力 |
操作应安全规范文明,能在规定时间内完成 |
三、学习内容
(一)电动葫芦起重机
电动葫芦属于起重机械的一种,简称电葫芦,是一种轻小型起重设备。葫芦具有体积小,自重轻,操作简单,使用方便等特点,用于工矿企业,仓储码头等场所。电动葫芦是由电动机、传动机构和卷筒或链轮组成,分为钢丝绳电动葫芦和环链电动葫芦两种。
2006年,我国工程起重机行业各项指标将超过历史最高记录。起重机行业各项经济指标与同期比较,都以两位数增长:全行业的销售收入同比增长48.6%,工业增加值同比增长72.7%,利润总额同比增长160%,这意味着工程起重机行业已步入了较快可持续发展阶段。
目前国际上电动葫芦的代表性产品为德国德马格起重机械有限公司生产的电动葫芦,电动葫芦的发展呈安全、可靠、高效、免维护和智能化的发展趋势。
电动葫芦的更新和发展,在很大程度上取决于电气传动与控制的改进。将机械技术和电子技术相结合,将先进的计算机技术、微电子技术、电力电子技术、光缆技术、液压技术、模糊控制技术应用到机械的驱动和控制系统,实现电动葫芦的自动化和智能化。在结构方面,国外的钢丝绳电动葫芦,多为方形结构设计,既美观便于安装、运输,还能很好地适应模块化设计,便于基型的组合和变换,大大拓宽了电动葫芦的使用范围。国外电动葫芦滑轮组结构及倍率组合方式多样,安装方式除悬挂与固定式外,还有低净空安装、双吊点形式及其他特殊用途的钢丝绳电动葫芦。而我国电动葫芦在这些方面基本是空白。
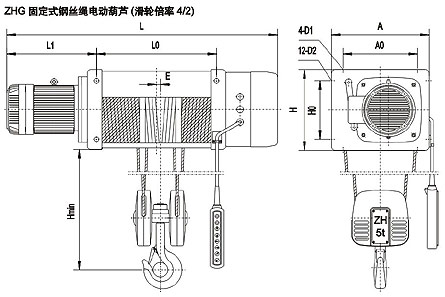
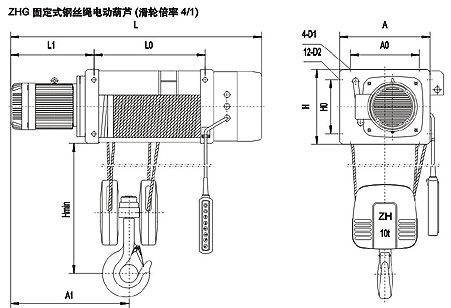
(二)几种典型的电动葫芦
1、单梁电动葫芦

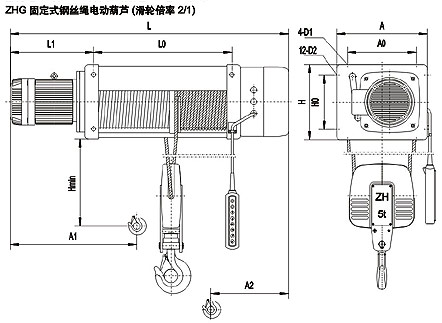
|
型号 |
起重量 |
起升速度 |
滑轮倍率 |
工作级别 |
A
AO |
H
HO |
D1
D2 |
L
E
A1 |
Hmin |
L LO |
自重(Kg) |
|
超升高度(m) |
|
H4 |
H6 |
H9 |
H12 |
H18 |
H24 |
H30 |
H9 |
|
ZH320G |
3.2 |
8 |
2/1 |
M4 |
425
320 |
345
240 |
ø 24
ø 22 |
515
10.5
627 |
580 |
-- |
1165
365 |
1275
475 |
1385
585 |
1605
805 |
1825
1025 |
2045
1245 |
260 |
|
4 |
6.3 |
2/1 |
M3 |
580 |
|
3.2 |
8 |
4/2 |
M4 |
460 |
1275
475 |
1385
585 |
1605
805 |
1825
1025 |
2045
1245 |
2265
1465 |
-- |
310 |
|
4 |
6.3 |
4/2 |
M3 |
460 |
|
5 |
4 |
4/1 |
M5 |
550 |
1275
475 |
1385
585 |
1605
805 |
-- |
-- |
-- |
-- |
330 |
|
6.3 |
4 |
4/1 |
M4 |
550 |
|
8 |
3.2 |
4/1 |
M3 |
550 |
|
ZH500G |
5 |
8 |
2/1 |
M4 |
500
380 |
415
300 |
ø 26
ø 24 |
518
17
646 |
685 |
-- |
1230
400 |
1335
505 |
1445
615 |
1660
830 |
1875
1045 |
2090
1260 |
370 |
|
6.3 |
6.3 |
2/1 |
M3 |
685 |
|
5 |
8 |
4/2 |
M4 |
540 |
1335
505 |
1445
615 |
1660
830 |
-- |
--- |
-- |
-- |
460 |
|
6.3 |
6.3 |
4/2 |
M3 |
540 |
|
10 |
4 |
4/1 |
M4 |
720 |
1335
505 |
1445
615
-- |
1660
830
-- |
-- |
-- |
-- |
-- |
3000 |
|
12.5 |
3.2 |
4/1 |
M3 |
720 |
3685 |
|
ZH1000G |
10 |
6.3 |
2/1 |
M4 |
660
500 |
550
400 |
ø 30
ø 26 |
620
27
751 |
865 |
-- |
1440
455 |
1495
510 |
1600
615 |
1805
820 |
2015
1030 |
2225
1240 |
725 |
|
12.5 |
6.3 |
2/1 |
M3 |
865 |
|
10 |
6.3 |
4/2 |
M4 |
670 |
1495
510 |
1600
615 |
1805
820 |
2015
1030 |
2225
1240 |
2240
1455 |
-- |
860 |
|
12.5 |
6.3 |
4/2 |
M3 |
670 |
|
16 |
4 |
4/1 |
M4 |
1005 |
1495
510 |
1445
615
-- |
1600
615 |
1805
820 |
-- |
-- |
-- |
1050 |
|
20 |
3.2 |
4/1 |
M4 |
1005 |
|
ZH2000G |
20 |
6 |
4/2 |
M5 |
800
600 |
680
500 |
ø 39
ø 39 |
0 |
885 |
-- |
1490
740 |
1670
920 |
1850
1100 |
2215
1465 |
2580
1830 |
-- |
1400 |
|
|
|
|
|
|
2、双梁小车式电动葫芦

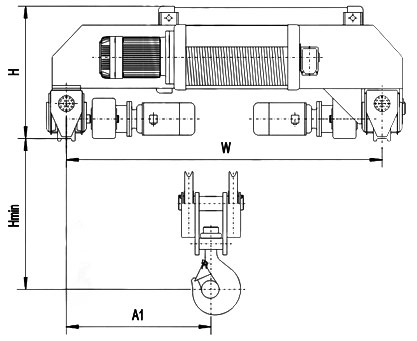
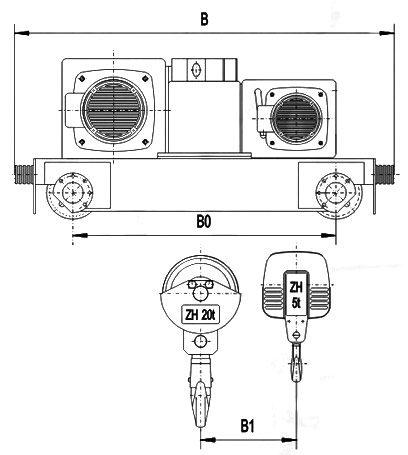
标准双梁小车式电动葫芦参数表
|
型号
|
起重量 |
起升速度 |
滑轮倍率 |
工作级别 |
BO |
B1 |
H |
W A1 滑轮倍率6/2 |
最大压轮(Kg) |
|
超升高度(m) |
|
H6 |
H9 |
H12 |
H15 |
H18 |
H24 |
H30 |
H9 |
|
ZH320BS |
3.2 |
8 |
2/1 |
M4 |
1565
1100 |
-- |
555
355 |
1400
590 |
1400
535 |
1400
480 |
1400
425 |
1600
470 |
1800
460 |
2000
450 |
1250 |
|
4 |
6.3 |
2/1 |
M3 |
1495 |
|
5 |
4 |
4/1 |
M5 |
555
351 |
1400
700 |
1600
800 |
1800
840 |
2000
825 |
2500
1110 |
-- |
-- |
1650 |
|
6.3 |
4 |
4/1 |
M4 |
2010 |
|
8 |
3.2 |
4/1 |
M3 |
2475 |
|
10/3.2 |
3.2 |
6/1 |
M4 |
1680
1200 |
400 |
635
345 |
1600
800 |
2000
955 |
2500
1125 |
3000
1300 |
-- |
-- |
-- |
3050 |
|
12.5/3.2 |
2.5 |
6/1 |
M3 |
3740 |
|
ZH500BS |
5 |
8 |
2/1 |
M4 |
1565
1100 |
-- |
620
460 |
1400
595 |
1400
545 |
1400
490 |
1400
400 |
1600
485 |
1800
480 |
2000
470 |
1875 |
|
6.3 |
6.3 |
2/1 |
M3 |
2265 |
|
10/3.2 |
4 |
4/1 2/1 |
M4 |
1680
1200 |
400 |
495
445 |
1400
700 |
1600
800 |
1800
850 |
2000
835 |
2500
1120 |
-- |
-- |
3150 |
|
12.5/3.2 |
3.2 |
4/1 2/1 |
M3 |
3840 |
|
16/3.2 |
3.2 |
6/1 2/1 |
M4 |
2000
1400 |
450 |
760
400 |
1600
800 |
2000
900 |
2500
1125 |
3000
1305 |
-- |
-- |
-- |
4895 |
|
20/5 |
2.5 |
6/1 2/1 |
M3 |
5990 |
|
ZH1000BS |
10/3.2 |
6.3 |
2/1 |
M4 |
1680
1200 |
480 |
775
590 |
1400
600 |
1400
545 |
1400
495 |
1400
440 |
1600
495 |
1800
490 |
2000
485 |
3630 |
|
12.5/3.2 |
6.3 |
2/1 |
M3 |
4390 |
|
16/3.2 |
4 |
4/1 2/1 |
M4 |
2000
1400 |
450 |
880
640 |
1400
700 |
1600
800 |
1800
880 |
2000
870 |
2500
1160 |
-- |
-- |
5060 |
|
20/5 |
3.2 |
4/1 2/1 |
M4 |
6160 |
|
10/3.2 |
3.2 |
4/1 2/1 |
M3 |
2320
1600 |
510 |
945
570 |
1600
800 |
2000
1000 |
2500
1190 |
3000
1380 |
-- |
-- |
-- |
7535 |
|
12.5/3.2 |
3.2 |
6/1 2/1 |
M4 |
9600 |
|
16/3.2 |
2.5 |
6/1 2/1 |
M3 |
525 |
1080
480 |
1400
700 |
1400
700 |
1600
800 |
1600
800 |
1800
900 |
2000
1000 |
2500
1250 |
11800 |
|
ZH2000BS |
20/5 |
6 |
4/2 2/1 |
M5 |
6325 |
|
25/5 |
5 |
4/2 2/1 |
M4 |
7700 |
|
32/5 |
4 |
4/2 2/1 |
M3 |
9625 |
|
40/10 |
3 |
8/2 2/1 |
M5 |
2720
1800 |
700 |
1175
680 |
1600
800 |
1600
800 |
1800
900 |
2000
1000 |
2000
1000 |
2500
1250 |
3000
1500 |
12100 |
|
50/10 |
2.5 |
8/2 2/1 |
M4 |
14850 |
|
63/10 |
2 |
8/2 2/1 |
M3 |
18450 |
四、学习思考:
如何根据实际工矿选择电动葫芦起重机
任务单元203:
一、教学目标:(8学时)
|
学习情境 |
门式起重机 |
|
职业行动能力 |
目标 |
|
专业能力 |
应知 |
门式起重机的结构 |
|
门式起重机的特点 |
|
门式起重机的发展现状 |
|
门式起重机的发展趋势 |
|
应会 |
能熟练操作门式起重机 |
|
社会能力 |
通过分组活动,培养团队协作能力 |
|
通过规范文明实训,培养良好的职业道德和安全环保意识 |
|
通过小组讨论、上台演讲评述,培养沟通能力 |
|
方法能力 |
通过查阅资料、文献、培养个人自学能力和获取信息能力 |
|
填写任务工作单,制订工作计划,培养工作方法能力 |
|
具有分析问题,解决实际问题的能力 |
二、学习要求和考核内容
据六步法进行学习:
①资讯(通过集中听课、自学、小组讨论等学习方式获取相应知识点)
②教学给出工作任务单,学生分组行动。
③根据任务完成情况评估,并抽查,演讲。
④完成并上交工作任务单
考核内容:包括学生学习态度、团队协作、知识点掌握.动手操作能力、分析决策能力.问题掌控能力等。
|
序号 |
考核内容 |
考核标准 |
|
1 |
任务任知程度 |
根据任务准确获取学习资料,有学习记录 |
|
2 |
情感态度 |
学习精力集中.学习方法多样,积极主动,
全部出勤 |
|
3 |
团队协作
|
听从指挥,服从安排,积极与小组成员合作,共同完成工作任务 |
|
4 |
工作计划制定
|
有工作计划,计划内容完整.时间安排合理,工作步骤正确 |
|
5 |
任务工作单 |
工作单完成及时.记录完整,结果分析正确.对老师布置的任务能及时上交,正确度在9 0%以上 |
|
6 |
问题思考 |
开动脑筋,积极思考,并对工作任务完成过程中的问题进行分析和解决 |
|
7 |
操作能力 |
操作应安全规范文明,能在规定时间内完成 |
三、学习思考:
门式起重机操作感悟?