任务单元401:
一、教学目标(7学时):
|
学习情境 |
装卸堆垛机器人 |
|
职业行动能力 |
目标 |
|
专业能力 |
应知 |
装卸堆垛机器人的特点和在物流中心的应用 |
|
国内外典型的装卸堆垛机器人 |
|
装卸堆垛机器人的技术参数 |
|
装卸堆垛机器人的主要结构 |
|
应会 |
装卸堆垛机器人开机检查、故障检查 |
|
装卸堆垛机器人单机操作,联机操作 |
|
装卸堆垛机器人安全注意事项和简单的路径遍程 |
|
社会能力 |
通过分组活动,培养团队协作能力 |
|
通过规范文明实训,培养良好的职业道德和安全环保意识 |
|
通过小组讨论、上台演讲评述,培养沟通能力 |
|
方法能力 |
通过查阅资料、文献、培养个人自学能力和获取信息能力 |
|
填写任务工作单,制订工作计划,培养工作方法能力 |
|
具有分析问题,解决实际问题的能力 |
二、学习要求和考核内容
据六步法进行学习:
①资讯(通过集中听课、自学、小组讨论等学习方式获取相应知识点)
②教学给出工作任务单,学生分组行动。
③根据任务完成情况评估,并抽查,演讲。
④完成并上交工作任务单
考核内容:包括学生学习态度、团队协作、知识点掌握.动手操作能力、分析决策能力.问题掌控能力等。
|
序号 |
考核内容 |
考核标准 |
|
1 |
任务任知程度 |
根据任务准确获取学习资料,有学习记录 |
|
2 |
情感态度 |
学习精力集中.学习方法多样,积极主动,
全部出勤 |
|
3 |
团队协作
|
听从指挥,服从安排,积极与小组成员合作,共同完成工作任务 |
|
4 |
工作计划制定
|
有工作计划,计划内容完整.时间安排合理,工作步骤正确 |
|
5 |
任务工作单 |
工作单完成及时.记录完整,结果分析正确.对老师布置的任务能及时上交,正确度在9 0%以上 |
|
6 |
问题思考 |
开动脑筋,积极思考,并对工作任务完成过程中的问题进行分析和解决 |
|
7 |
操作能力 |
操作应安全规范文明,能在规定时间内完成 |
三、学习内容
(一)RBT-6T/S02S教学机器人
为哈工大博实精密测控有限责任公司RBT-6T/S02S型教学机器人。教学机器人采用伺服电机和步进电机混合驱动,主要传动部件采用可视化设计,控制简单,编程方便,它是一个多输入多输出的动力学复杂系统,是进行控制系统设计的理想平台;它具有高度的能动性和灵活性,具有广阔的开阔空间,是进行运动规划和编程系统设计的理想对象。
机器人采用串联式开链结构,即机器人各连杆由旋转关节或移动关节串联连接,如图1-1所示。各关节轴线相互平行或垂直。连杆的一端装在固定的支座上(底座),另一端处于自由状态,可安装各种工具以实现机器人作业。关节的作用是连接的两连杆产生相对运动。关节的传动采用模块化结构,由锥齿轮、同步带、RV减速器和谐波减速器等多种传动结构配合实现。
机器人各关节采用伺服电机和步进电机混合驱动,并通过Windows环境下的软件编程和运动控制器实现对机器人的控制,使机器人能够在工作空间内任意位置精确定位。
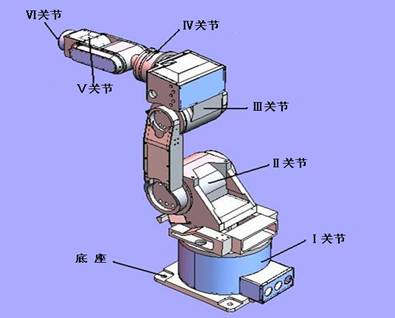
图1-1 机器人结构
机器人技术参数如下:
|
机构形态 |
串联关节型 |
|
自由度 |
6 |
|
可搬质量 |
2kg |
|
动作范围 |
关节Ⅰ转动 |
-150°~ +150° |
|
关节Ⅱ转动 |
-90°~ +90° |
|
关节Ⅲ转动 |
-90°~ +90° |
|
关节Ⅳ转动 |
-150°~ +150° |
|
关节Ⅴ转动 |
-90°~ +90° |
|
关节Ⅵ转动 |
-180°~ +180° |
|
最大速度 |
关节Ⅰ转动 |
60o /S |
|
关节Ⅱ转动 |
60o /S |
|
关节Ⅲ转动 |
60o /S |
|
关节Ⅳ转动 |
60o /S |
|
关节Ⅴ转动 |
60o /S |
|
关节Ⅵ转动 |
120o /S |
|
本体重量 |
150kg |
|
安装环境 |
温度 |
0~+45oC |
|
湿度 |
20~80%不结露 |
|
振动 |
0.5G以下 |
|
其它 |
避免易燃、腐蚀性气体、液体
勿溅水、油、粉尘等
勿接近电器噪声源 |
|
电源容量 |
1kvA |
注意事项:
1. 实验前确保机器人各连接电缆正确连接;
2. 应该在老师的指导下进行实验;
3. 机器人上电后,请千万注意身体的任何部位不要进入机器人运动可达范围之内;
4. 机器人运动不正常时,要及时按下控制柜的急停开关。
(二) FANUC机器人
机器人是由伺服电机驱动的轴和机械手臂的机械单元。连接机械手臂的地方是一个机械关节或者一个轴。J1, J2, 和J3是主轴。机器人的基本设置依据的是,每个主轴是作为线性轴还是旋转轴。腕轴的作用是移动在腕边缘上的受动端(工具)。腕本身可以围绕另外一个腕轴旋转,同时受动端可以绕另外一个腕轴旋转。

机器人控制器包括动力单元、使用者接口电路、动作控制电路、存贮器电路和输入输出电路。使用者应该使用教导盒和操作箱操作控制单元。教导盒是操作工具软件和操作者之间的桥梁。它通过电缆与控制器的印刷板连接。
用教导盒进行以下的操作:
机器人的连续手动进给J
Ø 程序生成
Ø 测试模式
Ø 实际工作的进行
Ø 状态的检查
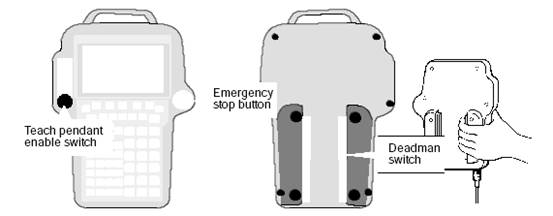
提供的开关:
|
Teach pendant
enable switch
教导盒使能开关 |
这个开关决定了教导盒是否可用。当开关关闭时,手动进给、程序的生成或者测试模式都不能进行。 |
|
deadman switch特殊手持式开关 |
这个开关是一个使能装置。在教导盒可操作时,只有deadman开关抱紧,机器人才可以动作,如果放开这个开关,机器人会立即停止。 |
|
Emergency stop
button
紧急停机按钮 |
按下这个按钮会立即停止机器人的运行。 |
教导盒上的按钮
教导盒上有如下几类按钮
Ø 菜单相关按钮
Ø 手动进给相关按钮
Ø 执行相关按钮
Ø 编辑相关按钮
表 1--1. 菜单相关按钮
|
按键 |
功能 |
|
F1 F2 F3 F4 F5 |
此键功能是选择界面最下面行的功能菜单 |
|
NEXT |
此键功能是切换功能键菜单到下一页 |
|
MENUS FCTN |
MENUS键显示屏幕菜单
FCTN键显示功能菜单 |
|
SELECT EDIT DATA |
SELECT键显示程序选择界面
EDIT键显示程序编辑界面
DATA键显示程序数据界面 |
|
MOVE
MENU
SETUP |
使用MOVE MENU菜单键移动机器人到一个参考位置。创建一个移动到这个参考位置的程序,给它分配一个宏指令,这样通过这个键就可以达到目的。
SETUP键显示设置界面 |
|
MAN
FCTNS |
用MAN FCTNS键显示手动操作界面 |
|
STATUS |
用STATUS键显示当前状态界面 |
|
I/O |
用I/O键显示输入输出界面 |
|
POSN |
用POSN键显示当前位置界面 |
表1--2. 进给相关按键
|
Key |
Function |
|
|
SHIFT |
用SHIFT键执行机器人的进给,教导位置数据并运行程序。左右两个SHIFT键功能相同。 |
|
|
|
-Z -Y -X +Z +Y +X
(J3) (J2) (J1) (J3) (J2) (J1)
-Z -Y -X +Z +Y +X
(J6) (J5) (J4) (J6) (J5) (J4) |
当移动键(SHIFT)按下时,这些进给键有效。它们都用作进给功能。 |
|
|
按键 |
按键功能 |
|
|
COORD |
用COORD键选择手动进给坐标系(手动类型)。每次按下COORD键,就选择了列表中的一种手动类型:关节坐标系(JOINT)、 手动坐标系(JGFRM), 全局坐标系(World frame), 工具坐标系(TOOL), 用户坐标系(USER)。在移动键(Shift)按下时,按下此键,就会显示改变坐标系的手动菜单 |
|
|
+% |
用这个倍率控制键控制进给速度的增量。每按一下按键,就会选择列表中的超越量:VFINE,FINE,1%,5%, 50%, 100%.)(5% 或者5% 以下,变化量为5% ;5% 或者5% 以上,变化量为5%) |
|
|
|
|
|
|
表 1--3. 执行相关按键
|
按键 |
功能 |
|
FWD BWD |
用FWD键和BWD键(+SHIFT键)开始程序。当移动键(SHIFT)在程序重新生成时释放,程序暂停。 |
|
HOLD |
HOLD键暂停程序 |
|
STEP |
用STEP键选择分步还是连续测试操作 |
|
|
|
表 1--4. 编辑相关按键
|
按键 |
功能 |
|
PREV |
PREV键存储了最近的状态。在某些情况下,界面不能马上回到上一个状态。 |
|
ENTER |
用ENTER键输入一个数字或者选择一个菜单 |
|
STEP |
用STEP键选择分步还是连续测试操作 |
|
BACK SPACE |
用BACK SPACE键立即删除光标前的字符和数字。 |
|
CURSOR |
用CURSOR键移动光标。光标在教导盒屏幕上是高亮显示的。随着教导盒按键的按下,它会变成操作目标(输入、值的改变或者列表) |
|
ITEM |
用ITEM键移动光标到指定号码的行 |
操作面板:
操作面板由按钮、开关和连接器组成
面板上按钮用来开关电源、开始程序、解除警报状态和进行其他操作,如下图:
操作面板上的开关
|
开关 |
功能 |
|
Power--on/off button |
开关机器人控制单元的电源。电源开时,按键亮。 |
|
Emergency stop button |
按下此键立即停止机器人。顺时针方向旋转,解除此键。 |
|
Alarm release button |
接触警报状态 |
|
User #1 and #2 buttons |
执行用户键定义的功能 |
|
Three mode switch |
通过此键选择适合机器人操作条件和使用状态的操作状态 |
操作面板上的LED灯
|
LED灯 |
功能 |
|
Alarm |
表明警报状态。按下alarm release按钮解除警报状态 |
机器人的动作
通过一个独立的动作指令,指定一个机器人的动作,或者一个工具中心点(TCP)从当前位置到目标位置的移动。机器人使用的是动作控制系统,它包括控制工具路径、加速(减速)、定位、进给和其他因数。
机器人控制单元可以控制多达16根轴,分成多达三个操作组(复合动作功能)。控制器可以一组控制多达9轴。组运行可以相互独立,但是可以通过同时运转机器人,使其同步。
机器人移动是通过教导盒上的手动进给或者程序中指定的动作指令进行的。
在通过手动进给运行机器人之前,请仔细观察进给键的操作和机器人的动作。
在通过手动进给运行机器人之前,要充分降低进给速度倍率。
用教导盒上相应的按键,执行机器人的手动进给。手动进给中,所选手动进给坐标系(手动类型)和进给速度倍率,决定了机器人的动作。
使用一个动作指令时,机器人的动作依据于指令指定的位置数据、动作类型、定位路径、移动速度和进给超越量。
可以选择三种动作类型(线性、圆弧和关节运动)中的一种作为机器人动作。当选择关节动作(JOINT)时,工具会随机的从指定的两个点间移动;当选择了圆弧动作(Circular)时,工具回沿着一段圆弧连接三个指定的点;当选择线性运动(Linear)时,工具会沿着一条直线,运行于指定的两点间。
可以从Fine和Cnt中选择定位路径。
安全防护
禁止在易燃环境中使用机器人
-- 禁止在易爆环境中使用机器人
-- 禁止在放射性环境中使用机器人
-- 禁止在水中或者十分潮湿的环境中使用机器人
-- 禁止使用机器人搭载人或者动物.
-- 禁止利用机器人作为梯子。(不要攀爬或者从机器人上悬挂)
在机器人运行前,应该确认没有人在安全护栏区内。同时,要检查确信不存在危险位置的风险。如果检测到这样的位置,应该在运行前消除隐患。
操作者在操作控制面板或者教导盒时不能戴手套。佩戴手套可能会引起操作失误。
在进入操作区域内工作前,即便机器人没有运行,也要关掉电源,或者按下紧急停机按钮。要设置看守,保证没有其他人进入机器人操作区域,防止其他人通过操作面板激活机器人。
紧急停机装置
机器人由如下紧急停机装置:
两个紧急停机按钮(安装在操作面板和教导盒上)
外触发紧急停机(输入信号)
任何情况下按下紧急停机按钮时,机器人都会立即停机。
机器人的手动进给
机器人的手动进给指得是,根据需要,在教导盒上手动输入指令,操作机器人动作。当用机器人手动进给,执行程序运动指令时,机器人向目标运动,随之位置被记录下来(对于机器人的手动进给,参看第五章)。
条件 H 教导盒必须是有效的。
H 在操作区域内必须没有人。操作区域内必须没有放置障碍物。
H 机械手指令必须定义为一个手动操作(MF)的宏。
步骤 1 按下并按住deadman开关,然后打开教导盒使能开关。
按下 TOOL 1(或者 TOOL2)键,就显示出TOOL 1(或者 TOOL2)界面。
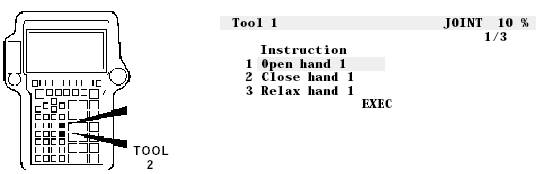
Ø 还可以从屏幕菜单选择 MANUAL FCTNS来显示手动操作界面。
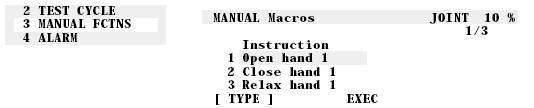 2 移动光标到想要的宏指令。按下并按住 SHIFT键,然后按 F3(EXEC)键。 2 移动光标到想要的宏指令。按下并按住 SHIFT键,然后按 F3(EXEC)键。
机器人的自动操作(参见FUNC操作机册)
四、学习思考
1、 RBT-6T/S02S教学机器人有哪几个关节?
2、 不同机器人之间工作结构区别及应用的区别?
3、 FANUC机器人重新自动复位时为什么有时不能正常运作,采用什么办法能使机器手正常复位。 |